外观
封装任务的task结构
为了更好地使用RTOS,我们需要深入理解RTOS工作原理,最好的方法是动手写一个RTOS。
如果你希望写一个类似RT-Thread/FreeRTOS的系统,欢迎关注这门课程:【RTOS内核开发】从0手写嵌入式操作系统
通过前面的内容,我基本上可以算是理解了RTOS多任务切换的机制。接下来,对现有代码做一些小的改动,使其代码具备多一些通用性。
添加task结构
如果你看过各种不同的RTOS源码,就会发现其内部对于任务都会采用一种结构来表示这任务,具体名称可能为os_task_t,thread_t等不同。在这个结构中,可以包含多途中不同类型的字段,如任务的名称、优先级、所属队列等各种信息。
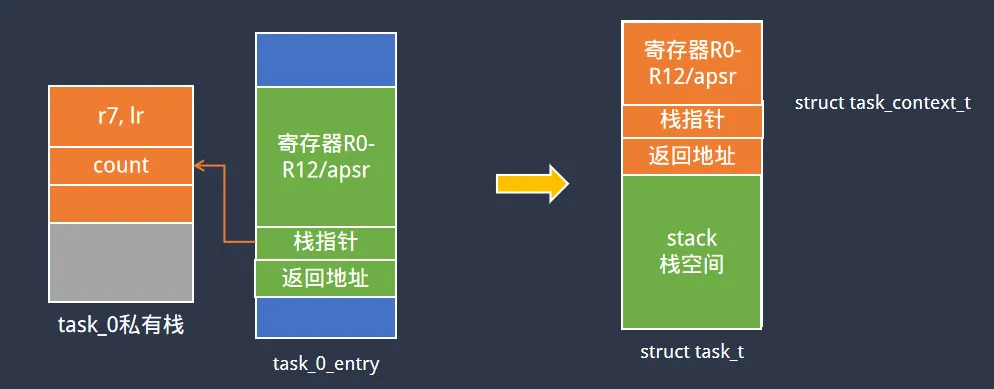
因此,我们也可以借鉴这种方式,增加一个结构体来描述任务。
struct task_context_t {
unsigned int r0, r1, r2, r3, r4, r5, r6, r7, r8, r9, r10, r11, r12; // 13
unsigned int return_addr; // r14
unsigned int stack_addr; // r13
unsigned int apsr;
};
struct task_t {
struct task_context_t context;
unsigned int stack[80];
}task0, task1;初始化task结构
接下来,针对task_t结构,原有的任务context初始化代码转移到task_init()中。即后续我们如果想添加新的任务,只需要针对该任务增加task_t,然后调用task_init即可完成任务的初始化工作。
void task_init (struct task_t * task, void (*entry)()) {
task->context.r0 = 0x0;
task->context.r1 = 0x1;
task->context.r2 = 0x2;
task->context.r3 = 0x3;
task->context.r4 = 0x4;
task->context.r5 = 0x5;
task->context.r6 = 0x6;
task->context.r7 = 0x7;
task->context.r8 = 0x8;
task->context.r9 = 0x9;
task->context.r10 = 0x10;
task->context.r11 = 0x11;
task->context.r12 = 0x12;
task->context.apsr = 1 << 31;
task->context.return_addr = (unsigned int)entry;
task->context.stack_addr = (unsigned int)(task->stack + 80);
}修改task_switch调用代码
通过以上设置,每个任务都有一个task_t结构与其对应。所有与任务有关的操作,都需要通过该任务的task_t结构进行处理,比如task_switch()中就需要从task_t结构中取出contex结构地址,然后完成任务切换。
void task_0_entry (void) {
int count = -1;
for (;;) {
count++;
task_switch(&task0.context, &task1.context);
}
}